Featured Projects
Converse Symmetry Breaking
Asymmetry-induced synchronization in oscillator networks
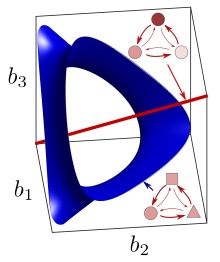
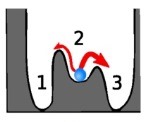
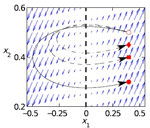
It is generally assumed that individual entities are more likely to exhibit the same or similar behavior if they are equal to each other: think of lasers pulsing at the same frequency, animals using the same gait, agents reaching consensus. In a recent PRL paper we have shown that this assumption is in fact false in networks of interacting entities. Our central discovery is a network phenomenon we term “asymmetry-induced symmetry” (AIS), in which the state of the system can be symmetric only when the system itself is not symmetric. Using synchronization as a model process, we demonstrate that the state in which all nodes synchronize and exhibit identical dynamics (a state of maximum symmetry, as it remains unchanged after swapping any two nodes), such as when lasers pulse together, can only be realized when the nodes themselves are not identical. Asymmetry-induced symmetry can be seen as the converse of the well-studied phenomenon of symmetry breaking, where the state has less symmetry than the system. AIS has far-reaching implications for processes that involve converging to uniform states; in particular, it offers a mechanism for yet-to-be-explained convergent forms of pattern formation, in which an asymmetric structure develops into a symmetric one. AIS also has implications for consensus dynamics, where it gives rise to the scenario in which interacting agents only reach consensus when they are sufficiently different from each other. See also AIS Demo and AIS talk.
Main publications
T. Nishikawa and A.E. Motter,
Symmetric states requiring system asymmetry,
Phys. Rev. Lett. 117, 114101 (2016).
doi:10.1103/PhysRevLett.117.114101 - Synopsis
arXiv:1608.05419
Y. Zhang, T. Nishikawa, and A.E. Motter,
Asymmetry-induced synchronization in oscillator networks,
Phys. Rev. E 95, 062215 (2017).
doi:10.1103/PhysRevE.95.062215
arXiv:1705.07907
Y. Zhang and A.E. Motter,
Identical synchronization of nonidentical oscillators: When only birds of different feathers flock together,
Nonlinearity 31, R1 (2018).
doi:10.1088/1361-6544/aa8fe7
arXiv:1712.03245
J.D. Hart, Y. Zhang, R. Roy, and A.E. Motter,
Topological control of synchronization patterns: Trading symmetry for stability,
Phys. Rev. Lett. 122, 058301 (2019).
doi:10.1103/PhysRevLett.122.058301
arXiv:1902.03255
Z.G. Nicolaou, D. Eroglu, and A.E. Motter,
Multifaceted dynamics of Janus oscillator networks,
Phys. Rev. X 9, 011017 (2019).
doi:10.1103/PhysRevX.9.011017 - Synopsis - Animated summary
arXiv:1810.06576 - Explorable Iterative Interface
F. Molnar, T. Nishikawa, and A.E. Motter,
Network experiment demonstrates converse symmetry breaking,
Nature Physics 16, 351–356 (2020).
doi:10.1038/s41567-019-0742-y - Supplemental Material
arXiv:2009.05582 - Animated summary
Z.G. Nicolaou, M. Sebek, I.Z. Kiss, and A.E. Motter,
Coherent dynamics enhanced by uncorrelated noise,
Phys. Rev. Lett. 125, 094101 (2020).
doi:10.1103/PhysRevLett.125.094101
arXiv:2008.10654
F. Molnar, T. Nishikawa, and A.E. Motter,
Asymmetry underlies stability in power grids,
Nature Communications 12, 1457 (2021).
doi:10.1038/s41467-021-21290-5
arXiv:2103.10952
Y. Sugitani, Y. Zhang, and A.E. Motter,
Synchronizing Chaos with Imperfections,
Phys. Rev. Lett. 126, 164101 (2021).
doi:10.1103/PhysRevLett.126.164101
arXiv:2104.13376
Y. Zhang, J. L. Ocampo-Espindola, I. Z. Kiss, and A. E. Motter,
Random heterogeneity outperforms design in network synchronization,
Proc. Natl. Acad. Sci. USA 118(21), e2024299118, (2021).
doi.org/10.1073/pnas.2024299118
arXiv:2105.11476
Z.G. Nicolaou, D.J. Case, E.B. van der Wee, M.M. Driscoll, and A.E. Motter,
Heterogeneity-stabilized homogeneous states in driven media,
Nature Communications 12, 4486, (2021).
doi:10.1038/s41467-021-24459-0
J.L. Ocampo-Espindola, C. Bick, A.E. Motter, and I.Z. Kiss,
Frequency Synchronization Induced by Frequency Detuning,
Science Advances 11, eadu4114 (2025).
doi:10.1126/sciadv.adu4114
arXiv:2505.04714
A.E.D. Barioni, A.N. Montanari, and A.E. Motter,
Interpretable disorder-promoted synchronization and coherence in coupled laser networks,
Phys. Rev. Letters 135, 197401 (2025).
doi:10.1103/8qvk-hpwb
arXiv:2511.04749
A.N. Montanari, A.E.D. Barioni, C. Duan, and A.E. Motter,
Optimal flock formation induced by agent heterogeneity,
Nature Communications 16, 9626 (2025).
doi:10.1038/s41467-025-64233-0
arXiv:2504.12297v1
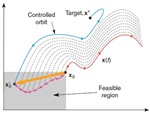
 A large variety of dynamical systems, such as chemical and biomolecular systems, can be seen as networks of nonlinear entities. Prediction, control, and identification of such nonlinear networks require knowledge of the state of the system. However, network states are usually unknown, and only a fraction of the state variables are directly measurable. The observability problem concerns reconstructing the network state from this limited information. Here, we propose a general optimization-based approach for observing the states of nonlinear networks and for optimally selecting the observed variables. Our results reveal several fundamental limitations in network observability, such as the tradeoff between the fraction of observed variables and the observation length on one side, and the estimation error on the other side. We also show that, owing to the crucial role played by the dynamics, purely graph-theoretic observability approaches cannot provide conclusions about one's practical ability to estimate the states. We demonstrate the effectiveness of our methods by finding the key components in biological and combustion reaction networks from which we determine the full system state. Our results can lead to the design of novel sensing principles that can greatly advance prediction and control of the dynamics of such networks.
A large variety of dynamical systems, such as chemical and biomolecular systems, can be seen as networks of nonlinear entities. Prediction, control, and identification of such nonlinear networks require knowledge of the state of the system. However, network states are usually unknown, and only a fraction of the state variables are directly measurable. The observability problem concerns reconstructing the network state from this limited information. Here, we propose a general optimization-based approach for observing the states of nonlinear networks and for optimally selecting the observed variables. Our results reveal several fundamental limitations in network observability, such as the tradeoff between the fraction of observed variables and the observation length on one side, and the estimation error on the other side. We also show that, owing to the crucial role played by the dynamics, purely graph-theoretic observability approaches cannot provide conclusions about one's practical ability to estimate the states. We demonstrate the effectiveness of our methods by finding the key components in biological and combustion reaction networks from which we determine the full system state. Our results can lead to the design of novel sensing principles that can greatly advance prediction and control of the dynamics of such networks.